应用领域
作为“转移标准”,用来校准扭矩扳手校准装置的扭矩扳手静态校准
高精度扭矩扳手的校准
介绍了扩展测量不确定度的分类和确定方法
专门设计通过杆臂施加扭矩的转接(或参考)扳手,对横向力和弯曲扭矩不敏感
下面的数字代表标准的段落
3.扭矩扳手的特征
• 该工具的所有组件,包括电缆,必须被识别(生产厂商的名称、类型、4或6线、序列号等等)
• 必须表明额定扭矩
• 扳手与校准设备之间的连接不得引入侧向力或弯矩
• 可以修改扭矩施力点:
– 在通用扭矩扳手范围内的转移扳手 (在额定扭矩功能的DKD-R 3-8内定义)
– 在其他扭矩扳手中,手柄长度的一半
4.1 扭矩扳手的校准
• 校准 = 将已知扭矩应用于传感器并记录其提供的数据
• 如果由于交换的额外不确定性小于校准结果的相对不确定度的 1/3 (SCS 在不确定度平衡中考虑到这一点),我可以交换读取单位
• 组件和适配器必须能承受最大传输扭矩的1.5 倍
• 校准前,扭矩扳手和适配器必须以额定扭矩的 8 至 12% 过载至少加载4次,持续1 至1.5 分钟(为安全起见,并避免在校准期间发生损坏)
4.2 指示设备的分辨率
• 分辨率 r 是最后一个活跃数的增量,前提是当工具卸载时最大波动为 1 个增量。
• 如果指示变化超过1个增量,则分辨率为波动的一半 + 1 位数
• 测量范围的最小值根据下一个表中的级数定义(分类标准)
• 对于具有主动零点抑制的显示设备,应关闭零点抑制
4.3 校准的准备工作
• 所有调整(如有)必须有记录
• 测量应在温度稳定后进行
• 零值信号必须在纵向位置上已卸载扭矩的校准前后记录
• 正向指示顺时针扭矩
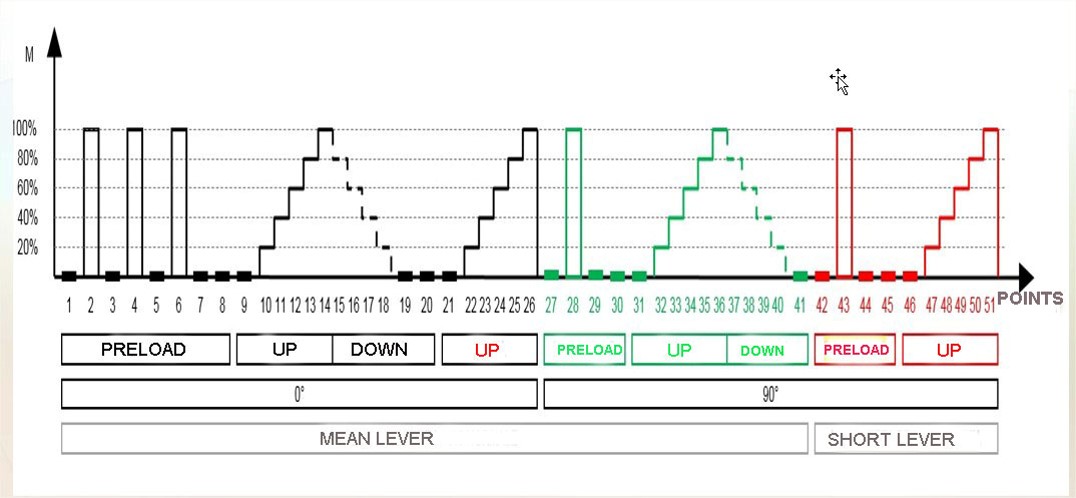
4.4 校准程序
• 按指定步骤进行顺时针或逆时针校准 (通常在测量范围内为5步)
• 我们将每步的等待时间定为10秒,尽可能保持恒定
• 在校准方向的第一个周期中,必须对额定扭矩进行3次预紧,并在每次安装位置发生变化后进行1次
• 每次预紧(短时间)后等待零值稳定(最多3分钟),并记录数值
• 在第一个安装位置的最后一次预紧后,在3分钟后记录蠕变
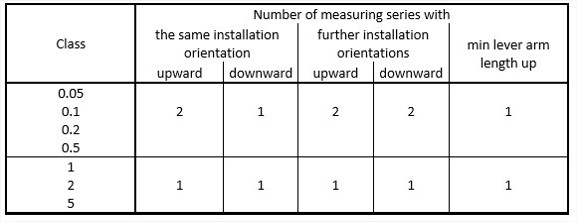
• 最好是在120°的3个位置进行校准
• 对于1、2和5类,可以仅在90°或120°有一次旋转
• 如下表所示,测量的数量取决于扭矩传感器的类别
所需测量序列的数量
扭矩阶段的最小数值(除零级之外)如下:
• 级数 0.05 至 0.2 = 8 (在测量范围内适当分布)
注: 例如,在级数10、20、30、40、50、60、80和100 % ME 或
2、5、10、20、40、60、80和100 % ME
• 级数 0,5 = 5 (20、40、60、80和100 % ME)
• 级数 1 至 5 = 3 (20、60和100 % di ME) (SCS 的第1类程序:5 级)
测量范围的最小值应为一个校准值.
第1类校准序列
• 环境温度必须在18 和 28°C(最佳为 22°C)之间,并在±1 K内稳定。
• 特别是存在蠕变时,两个加载步骤之间的间隔必须相同
• 测量前的指示可以归零或包含在计算中
• 对于具有定义刻度的仪器 (N∙m),必须在每一系列测量开始时将指示归零。
臂杆长度的变化
(仅适用于转移扳手)
• 为了评估施力点对臂杆的影响,在额定扭矩功能中(仅限转移扳手)提供了一系列的臂杆长度、平均值和短臂,见表格。
• 标准扳手提供了手柄中心的半长度变化
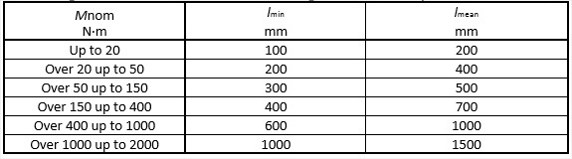
• 如果扭矩大于2000 N·m,将选择合适的臂杆长度
4.4.7 扭矩扳手的评估
可再现性 b, 可重复性 b’ 和 bl
• 每个校准点均计算可再现性 b,作为臂杆平均长度的不同安装位置的递增级数差
• 每个校准点均计算可重复性 b’,作为不同安装位置和臂杆平均长度的递增级数差
• 每个校准点均计算可重复性 bl,作为臂杆平均长度值的第二递增级数和最小臂杆值级数的差值
插值误差 fa
• 插值误差 fa 是通过由原点和第一或第三度方程所用校准点函数计算的平滑函数来确定的
• 各校准步骤的插值误差计算为校准结果和相关平滑函数值的差
• 对于带定义刻度的扭矩扳手(如 SCS 扳手),显示偏差 fq 为已定
零点信号f0 的相对误差
• 零值应在每个递增级数之前和每递减级数之后记录。
• 零值应在完成卸力约30秒后读取
• 零误差f0是所有安装位置两个读数差的最大绝对值
可逆性(滞后) h
• 每个校准扭矩的可逆性误差h(MK)是每个扭矩步骤的递增和递减级数示值差的最大绝对值
校准结果X
• 每个扭矩值的估计值代表平均值臂杆长度的递增扭矩测量级数结果平均值
示值误差 fq
• 示值误差fq仅用于在扭矩设备内直接显示结果的扭矩仪,且其不能用电子示值适配表示扭矩结果的插值函数
• 表示不同安装位置增加扭矩的平均值与所应用的参考扭矩之间的差值
分类原则
某类分配给扭矩扳手的测量范围,包括符合相应分类标准的所有校准扭矩 – 从测量范围的上限到最小的校准扭矩
分类测量范围的最小值应为:
• ≤ ME 的20% (级数 0.2 至 5)
分类标准
为进行分类,绝对数量将根据下表转换为相对数量。因此必须考虑以下标准:
• 具有相同安装方向的范围,
• 具有不同安装方向的范围,
• 具有不同臂杆长度的范围,
• 插值偏差或示值偏差,
• 零点偏差和
• 可逆范围。
扭矩扳手的分类标准
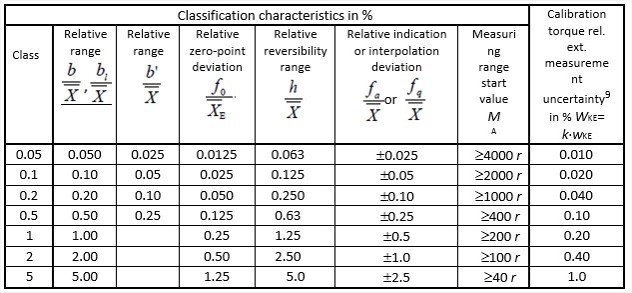
我们的表格自动检查所有数值,以确定扭矩扳手的类别
校准证书
我们稍后将详细分析校准证书,其中至少必须包含以下信息
• 申请人,
• 扭矩扳手和扭矩引入部件的所有元件标识,以及校准装置的名称,
• 有关左右扭矩的信息,以及臂杆长度,
• 根据附录 B 列出相关测量范围和测量不确定度的分类结果,
• 估计(上行级数测量值的平均值)和平衡函数,
• 执行校准的环境温度,
• 校准日,
• 识别校准实验室的信息,
• 对指令的引用。
此外, 校准证书还应包括:
• 测量值和根据项目4.4.7的计算特征表,以及曲线的图形表示。
对于具有定义刻度的扭矩扳手(比如 SCS),可以声明一类所需参数的符合性;而其他扭矩扳手仅能额外显示插值曲线方程。
有效期
最大证书有效期不得超过26月,但通常建议作年度校准,尤其是当有特定的可追溯性要求或质量保证法规要求时
扭矩扳手在以下情况下应重新校准:
• 如果曾经过载,即在过载测试期间高于施加扭矩
• 进行纠正性维护后;或
• 在可能影响计量性质或测量不确定度的不当操作后。
测量不确定度预算(根据 DKD-R 3-7标准)
与扭矩 M 相关的相对标准测量不确定度 w 如下:
 其中:
其中:
![]()
wKE 是校准系统的不确定性以及 ∂M 参与的各种影响:
• δM1 显示设备的分辨率 r 对校准对象的影响
• δM2 可重复性 b’的影响
• δM3 可再现性 b 的影响
• δM4 可逆范围 h 的影响
• δM5 回零 f0 的影响
• δM6 力引入条件 bl 的影响
• δM7 示值或插值偏差 fq 或 fa 的分别影响。
• δM8 扭矩校准装置的测量不确定度 UKE 的影响,包括扭矩校准装置长时间稳定性的部分。
• 对于未定义刻度和用线性方程,或定义刻度,扩展不确定范围 W’考虑到插值 fa 或显示 fq 的偏差如下
![]() 对于未定义刻度和用线性方程
对于未定义刻度和用线性方程
![]() 对于定义刻度
对于定义刻度
计算将自动在电子表格上执行, 结果显示在校准证书的第4页 (表 8.1) 中
分布函数
DKD 3-7 包含一个表,用于计算对不确定性的算法产生不同影响的相对标准偏差:
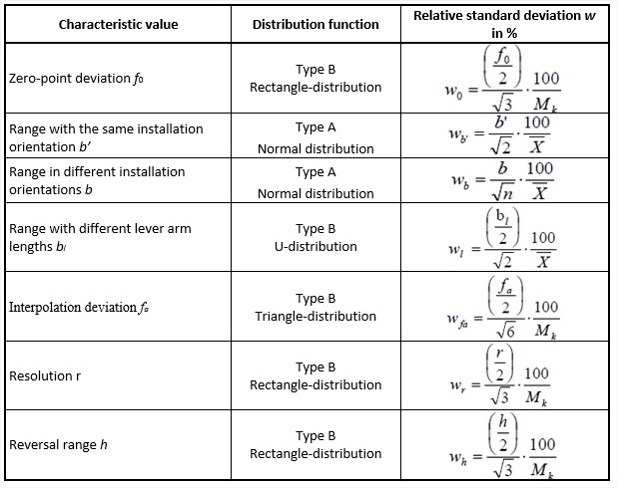
我们电子表格中的计算按标准内所示开发
相对不确定度
如表所示,此计算公式使用贡献值:


这些计算由电子表格进行处理,其结果被用于计算扭矩传感器的校准不确定度
校准证书
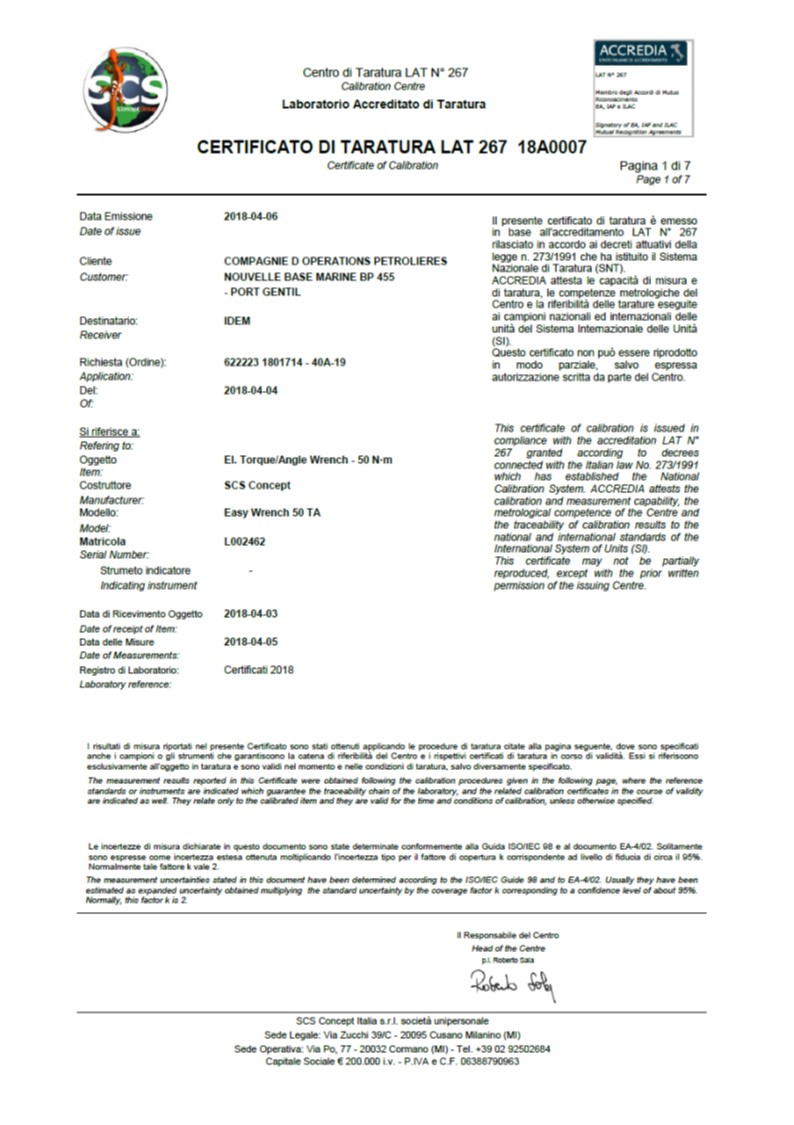
第1页: 封面页
第一页遵照 ACCREDIA 模版: 除了 ACCREDIA 徽标外,还有 SCS 徽标。这些徽标显示在校准证书的每一个页面上。此页包含客户的标识和有关订单的信息、待校准仪器的信息 (种类、型号和序列号)、收到仪器的日期和校准日期、实验室物流信息和授权签字(中心或其它机构的负责人)。
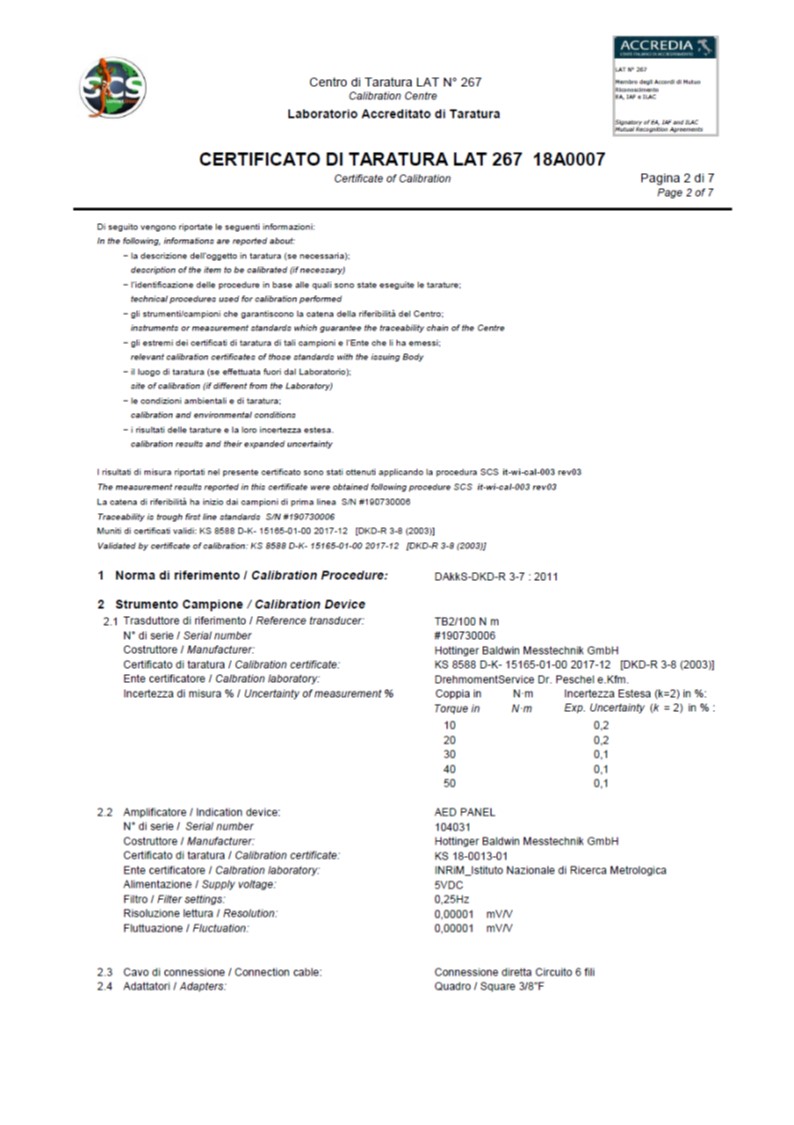
 第2页: 信息
第2页: 信息
第二页根据 Accredia 模版,提供了进一步的信息:
• 参考标准
• 实验室参考的标识细节及其可追溯性(校准证书和不确定性)
• 连接到参考的放大器标识和特征
• 电缆和适配器特征
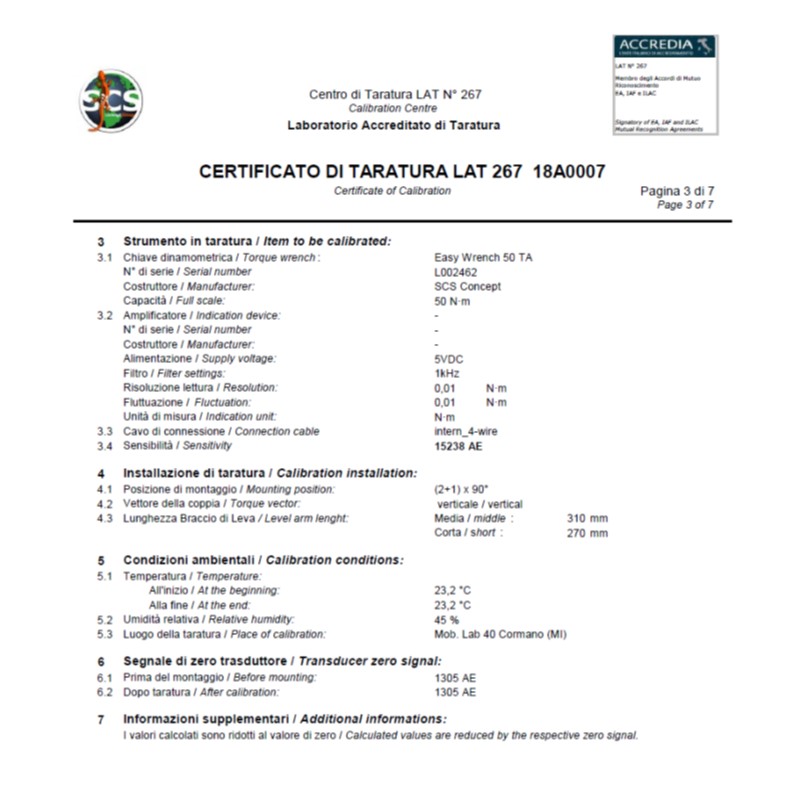
 第3页: 信息
第3页: 信息
详细写明以下信息:
待校准工具的特征、其放大器、电缆、适配器、灵敏度、校准装置、环境条件、校准地点(在作外部校准时)和零信号值、校准前后,以及与校准相关的任何其他信息。
 第4页: 校准和分类结果
第4页: 校准和分类结果
此页显示了与线性插值曲线 (顺时针和/或逆时针) 相关的不确定值, 如本例所示,为工具在定义刻度范围内的不确定性。
第二个表按照DKD-R 3-7,根据下一页表9内的参数分类。
第5页: 插值方程和分类标准
本页显示:
9.插值方程,将被用于扭矩传感器的分级,并获取以下选项卡的值。13 在第7页 (立方插值)上。
10.扭矩传感器分级标准的值。
该级数自动确定,验证所有参数是否符合标准要求。
 第6页: 测量数据
第6页: 测量数据
• 该页有一个表,其中测量值被显示为根据指定的测量周期所施加的扭矩函数。
• 表内的值以 N∙m 单位表示,也可以用 mV/V 单位表示。

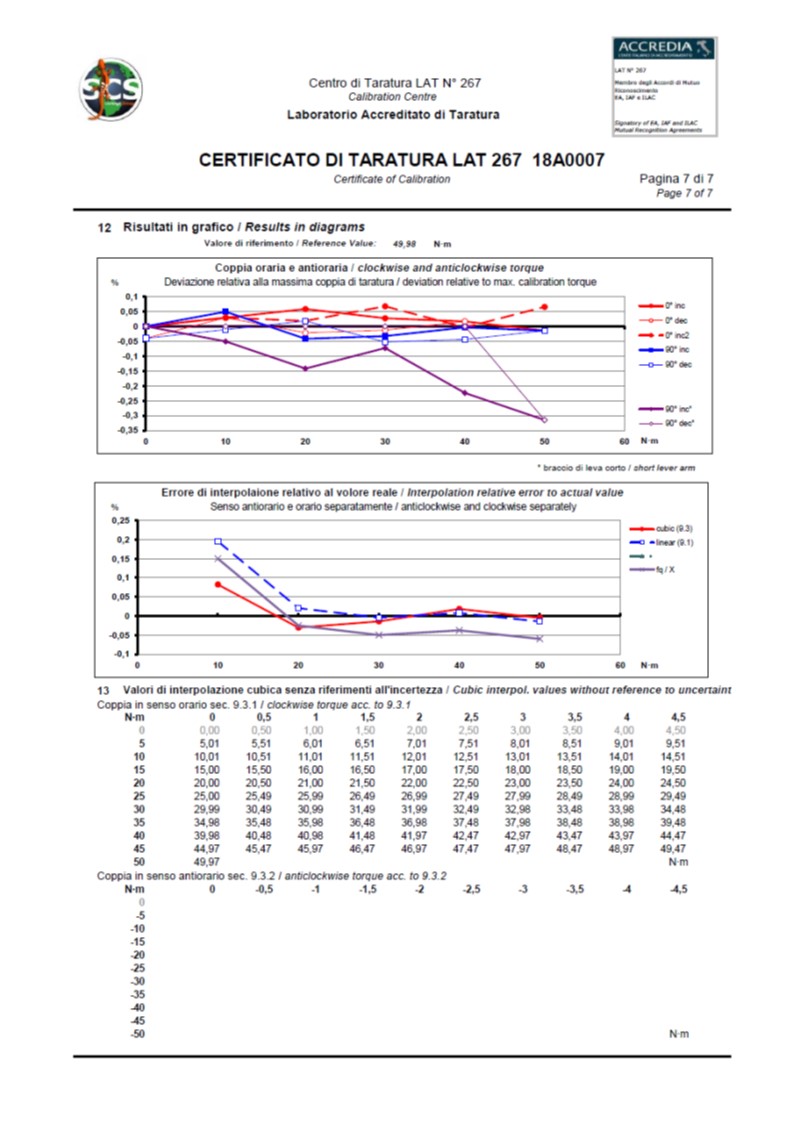
第7页: 以图和立方插值显示的结果
• 第一个图显示各单独校准步骤的相对误差
• 第二个图显示插值误差趋势
• 立方插值表显示使用第5页9.1节中的用于计算各测量步骤中间值的公式计算出的数值